日本国内规模最大的游戏行业大会 “CEDEC 2025” 于 2025 年 7 月 22 日至 7 月 24 日举办。在大会最后一天,一场以 “《宇宙机器人》:节奏流畅的 3D 关卡设计” 为题的演讲顺利开展。
本次报道将聚焦 PlayStation 5独占游戏《宇宙机器人》的开发团队 ——PlayStation Studios Team ASOBI 的首席设计师矢德浩章先生,为大家解析打造 “节奏流畅的 3D 关卡设计” 的核心要点。

1. 打造节奏流畅关卡设计的 30 个核心要点
本次演讲以 2024 年发售的 3D 平台跳跃游戏《宇宙机器人》为案例 —— 该作充分运用了 PS5 的自适应扳机(Adaptive Trigger)、触觉反馈(Haptic Feedback)等功能,为玩家带来沉浸式体验。
演讲嘉宾是负责该作开发的索尼互动娱乐旗下 PlayStation Studios Team ASOBI 的首席游戏设计师矢德浩章。他在演讲中分享了 “打造玩家可自然流畅游玩的关卡” 与 “激发玩家兴奋、惊喜等情绪的关卡” 的方法。
演讲中还介绍了《宇宙机器人》系列的过往发展与 Team ASOBI 团队:这是一支由约 60 人组成的全球化团队,成员来自 12 个国家。
矢德浩章先生最初是以程序员身份加入公司,《宇宙机器人》是他首次负责关卡设计的项目。也正因是 “首次尝试”,他在演讲中清晰地梳理了开发过程中对 “关卡设计需具备哪些要素” 的思考 —— 不仅为有经验的关卡设计师梳理了其凭直觉掌握的设计逻辑,也为非关卡设计领域的创作者提供了可应用于项目的实用思路。
在矢德先生看来,“关卡设计” 是指 “制定关卡制作计划、实际构建地形、布置各类元素,并将这些转化为体验传递给玩家” 的过程;而 “节奏流畅的关卡设计”,则是指 “玩家能以连贯的节奏、新鲜的感受,体验关卡中的各类内容” 的状态。
他首先强调 “不同游戏的核心关注点各不相同”,并表示《宇宙机器人》作为一款动作游戏,始终将 “节奏流畅的关卡设计” 置于重要位置。演讲中,他结合实际案例,分 7 个模块、共 30 个要点,详细解读了《宇宙机器人》3D 关卡设计的关键思路。
2. 善用 “素材”,亲手堆叠趣味体验 —— 准备篇
要点 1:先找 “好素材”,再做 “烹饪”
关卡设计的第一步是 “准备阶段”—— 即诞生关卡创意的阶段。不妨设想这样一种场景:“若要求你独自构思并制作一个关卡,你会如何入手?”—— 你可能会思考关卡故事,或关注当下的设计趋势,方法多种多样。
对此,矢德先生将 “关卡” 比作 “料理”,生动解释了 “以素材为核心思考” 的优势:“关卡设计师就像为客人烹制料理的厨师。当你踏上寻找优质食材的旅程,遇到‘鲜美的鲷鱼’和‘甘甜的葡萄’时,自然会联想到‘或许能打造一道鲷鱼萝卜配葡萄酒的美味套餐’,思路也会随之清晰。”
在实际游戏开发中,“素材” 涵盖玩法、技术、美术、音效等内容。矢德先生指出,若能先找到 “好素材”,便能明确 “应打造怎样的关卡”。

而判断 “素材是否优质” 的核心标准,在于 “是否能发挥游戏的特色与卖点”。以《宇宙机器人》为例,团队会以 “能否通过 PS5 专属手柄 DualSense 带来愉悦体验” 为依据,筛选素材。
演讲中还举了一个实际案例:团队先发现 “按压 R2 键模拟拧干海绵的触感十分舒适”,随后便思考 “将‘海绵’作为动作游戏的素材”,进而衍生出相关关卡。最初的想法是 “让玩家化身为海绵,吸水后变大、挤水后释放水分”;接着顺理成章地推导 ——“海绵动作需要水,因此关卡美术主题应与水相关”“在该主题下,哪些对象会让人想浇水?”,思路逐步延伸,最终形成完整关卡设计。

要点 2:收集创意并反复测试
找到 “能发挥游戏特色的好素材” 后,下一步便是 “测试”。团队会围绕素材,收集 “能让玩家感到有趣、舒适的使用方式”“与其他素材的趣味组合” 等 “可能让玩家眼前一亮的使用场景”。
值得注意的是,头脑风暴并非单人进行,团队协作更为高效。Team ASOBI 的做法是:针对预先确定的主题,由 5 人左右组成小组,进行时长约 30 分钟的头脑风暴;产生的创意会用便签纸简单绘图记录,并张贴存档;之后从中筛选出优质创意,在游戏中实际测试。
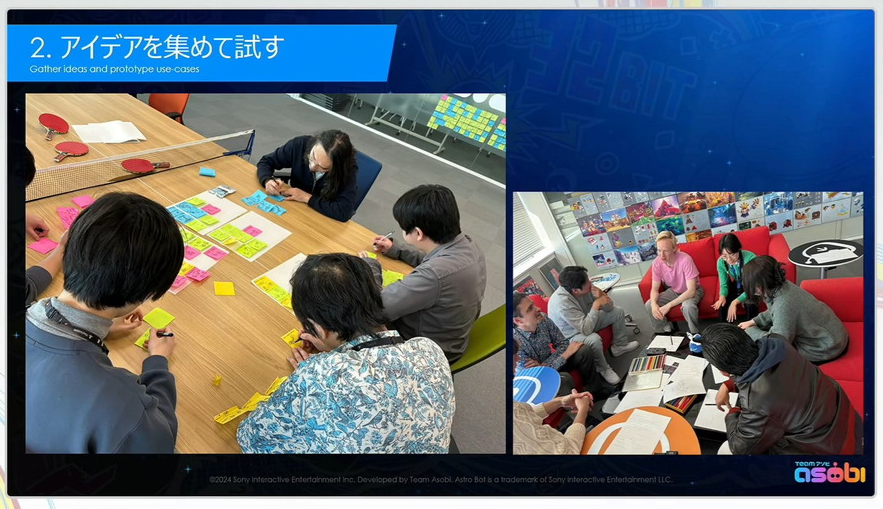
测试后效果良好的使用场景,会直接应用于关卡设计。矢德先生表示,“先测试再构思关卡” 的优势在于 —— 开发者能在明确 “优质体验是什么” 的前提下启动设计,更有信心推进计划。
演讲现场还播放了开发过程中的视频,展示了团队 “测试秘密目标隐藏方式” 的阶段 —— 力求为玩家打造 “有趣且印象深刻” 的发现体验。
要点 3:明确设计目标
当 “好素材” 与 “好使用场景” 就绪后,下一步是打造 “独特的玩法” 与 “能凸显玩法的独特美术主题组合”。

在设计过程中,需兼顾 “游戏整体是否存在相似关卡或主题”,确保内容多样性;同时明确 “本关卡将通过‘某玩法 + 某美术主题’的组合,为玩家带来怎样的体验”—— 这是准备阶段的第三个核心步骤。
此外,团队还会关注游戏整体的 “自然与人工元素平衡”“色彩平衡”,并据此调整关卡设计。
要点 4:规划从起点到终点的完整流程
至此,便可开始大致规划单个关卡的整体框架。团队会以文档形式记录必要信息,包括:关卡规模、地标、关卡外部结构、将出现的敌人与机关、玩家能在关卡中获得的体验,以及 “哪些时刻会让玩家感到兴奋” 等。
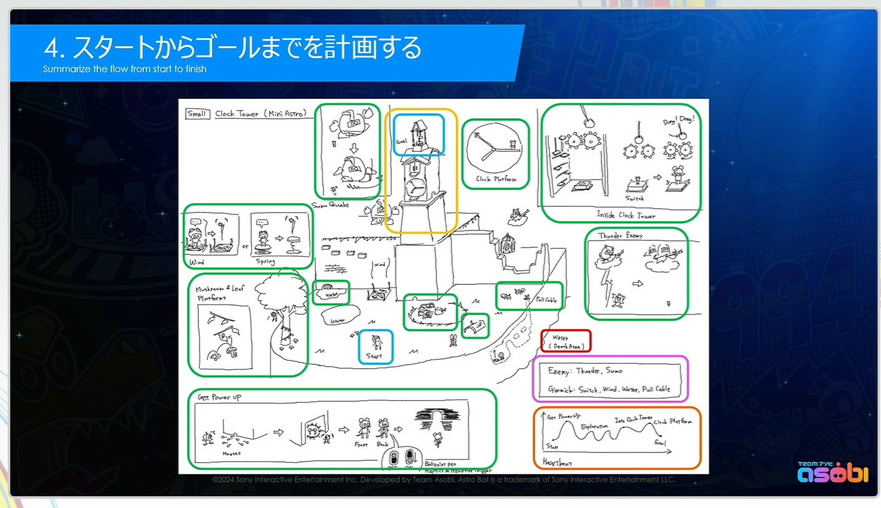
值得一提的是,Team ASOBI 的关卡设计文档 “仅一页”。矢德先生解释道,团队的关卡设计师 “需自主思考并启动关卡制作”,因此无需共享细节设计图,也无需严格按照给定设计图的尺寸来制作。在后续开发中,设计师会一边制作关卡、一边实际游玩:保留效果好的部分,若某部分效果不佳则立即更换方案,通过 “堆叠趣味元素” 推进开发。
现场展示的 “已发售关卡的实际视频” 也印证了这一点 —— 能明显看出最终关卡与初始规划文档存在诸多差异。
3. 设计易上手的关卡地形与结构 —— 几何设计篇
要点 5:清晰呈现主路径
矢德先生首先展示了 “节奏流畅关卡设计” 的简单案例,并强调:“让玩家无需犹豫、顺畅推进主路径,对打造节奏流畅的关卡至关重要。”

在该案例关卡中,玩家从起点就能看到远处的终点,途中等待救援的机器人也清晰地出现在正前方。主路径明确,通往 “迷你目标” 的路线也一目了然 —— 这种设计能让玩家在探索支线时,清晰知道 “自己当前在绕路,之后会回到主路径”,从而安心游玩。
随后展示的 “大型关卡案例” 也遵循类似逻辑:关卡深处有被束缚的角色,但玩家只需先穿过前方的门,进入泡泡中击败敌人,即可获得钥匙、破坏一条锁链;之后玩家能自然联想到 “沿着剩余锁链的位置寻找,就能找到其他钥匙并破坏锁链”,从而无需犹豫、节奏流畅地推进关卡。

要点 6:消除模糊感
打造节奏流畅关卡的另一个关键要点,是 “消除不必要的犹豫”。以关卡中的台阶为例,团队会将其高度设计为 “玩家一眼就能判断是否需要跳跃”,同时采用 “平整的表面”—— 避免玩家因 “是否需要跳跃” 的思考而打乱游玩节奏。

此外,在 “圆形元素较多的关卡” 中,团队会通过 “改变玩法区域与建筑的形状、颜色”,让玩家能自然区分 “可交互的玩法区域” 与 “不可交互的建筑”,减少玩家向 “非关卡区域的圆形物体” 移动的误操作。
同时,团队还会注意 “避免用不必要的装饰增加信息干扰”。演讲中展示了一个改善案例:某关卡曾因 “是否能攀爬的墙壁不明确”“地面装饰过多导致信息杂乱”,后续被调整为 “一眼就能看懂的简洁结构”。
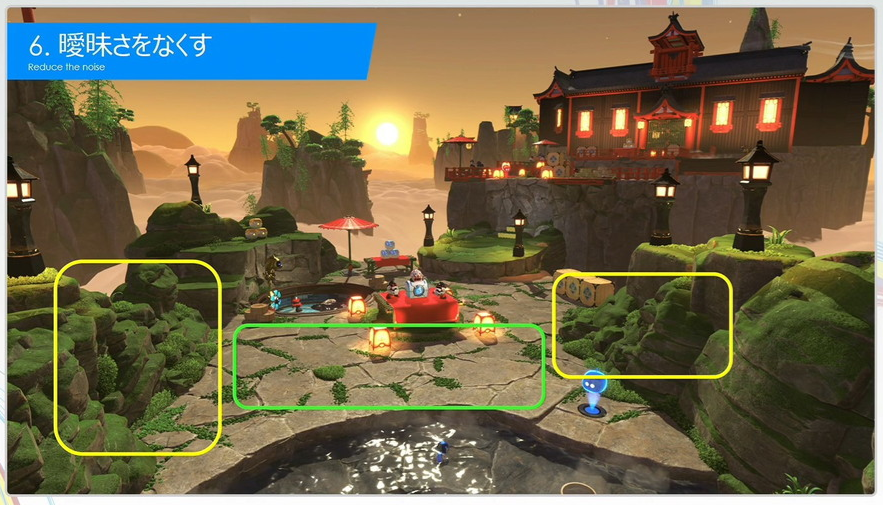

(上图为改善前,下图为改善后)
要点 7:避免玩家迷失行进方向
“让玩家清晰知晓从起点到终点的方向”,是 “一眼看懂” 设计逻辑的重要组成部分 —— 能让玩家无需犹豫,一边探索一边顺畅推进。

将终点设置在 “地标位置”,是防止玩家迷失方向的有效技巧。例如某关卡中,玩家抵达目的地后地形会发生变化,上方变为终点;借助周围地形引导,玩家能产生 “只要向上走,就能靠近终点” 的安心感。

要点 8:清晰呈现地形纵深
对于 “包含跳跃操作的动作游戏”,“让玩家清晰判断地形纵深与高度” 尤为重要。不妨设想这样一种场景:仅看当前画面,你能判断地形的纵深和高度吗?
有时,玩家可能会觉得 “某个平台似乎能跳过去”,但转动相机后会发现,其实只有远处有一个大型平台 —— 这是 3D 关卡设计中常见的问题:因相机视角限制,画面中远处的物体看起来较小,导致玩家难以判断物体的大小与距离。
针对这一问题,矢德先生分享了两种解决方法:
- 第一种是 “连续放置相同形状、相同大小的物体”:若物体形状和尺寸一致,玩家能更轻松地判断物体间的距离与高度差;
- 第二种是 “统一地形出入口的宽度”:即使地形高度或角度发生变化,统一的宽度也能让玩家更容易判断纵深,避免视觉上的混乱。
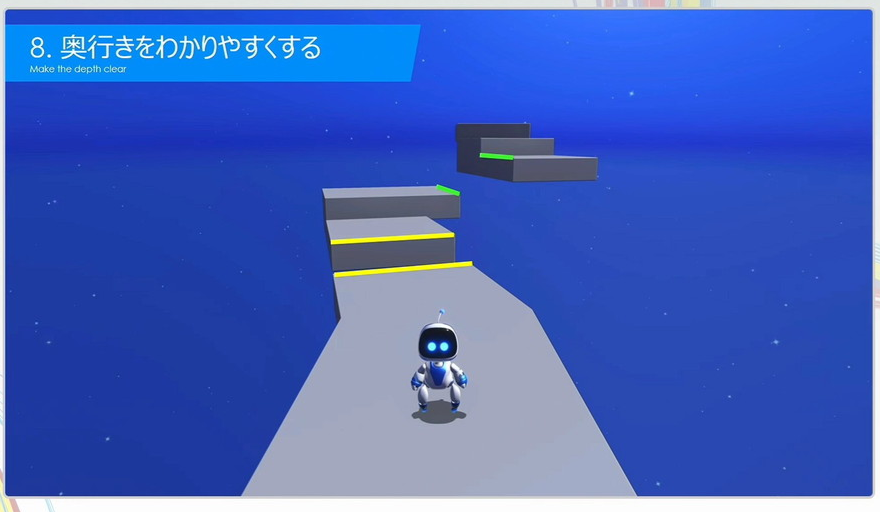
黄色与绿色线条分别对应一组出入口
矢德先生表示,这种技巧 “实用性极高,经常使用”,并展示了其他案例 —— 尤其是 “平台循环移动” 的场景,更需要细致处理 “纵深清晰度”,确保玩家能准确判断落点。

例如某 “龙卷风场景” 中,平台虽会晃动以模拟 “处于龙卷风中” 的感觉,但始终保持 “纵深清晰可见”。
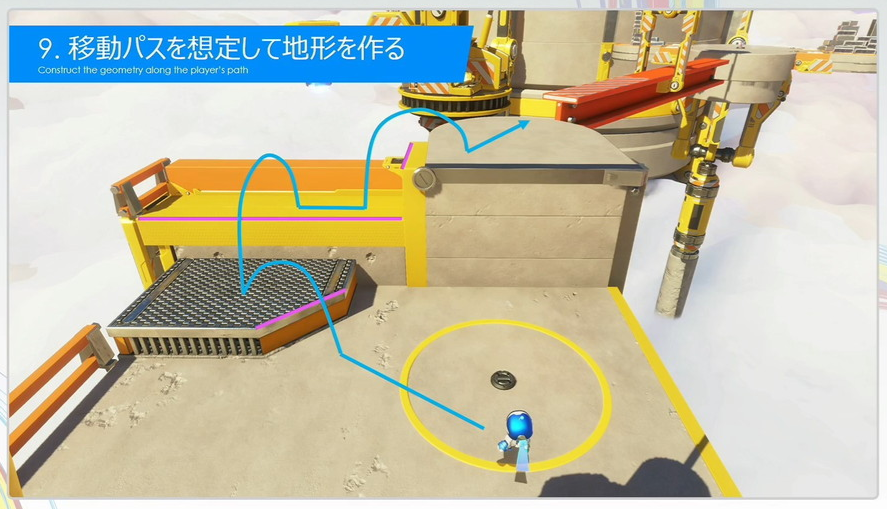
要点 9:结合预期移动路径设计地形
几何设计篇的最后一个要点,是 “根据预期移动路径设计地形”。以某关卡为例(见现场展示图片),团队预期玩家会 “直行后向右转”,因此地形也设计为 “向右侧平滑弯曲” 的形状。
矢德先生还提到一个细节:“若预期移动路径是‘突然右转’,那么地形设计为‘棱角分明的形状’会比‘弯曲形状’更合适。”—— 可见团队在 “简单细节” 上也会细致考量,确保地形与玩家移动逻辑匹配。

另一案例中,团队预期玩家会 “登上台阶后向右后方行进”:因玩家在第一段台阶需 “斜向移动后跳跃”,团队便将台阶形状设计为 “与移动方向正对”;同时,考虑到《宇宙机器人》能通过触觉反馈让玩家 “感知地面材质与音效”,团队还会结合 “触感节奏” 来布置地面材质。
4. 兼顾手柄操作与移动路径 —— 布局篇
要点 10:结合预期移动路径布置元素
确定关卡体验与地形后,便进入 “布局篇”—— 首先要解决的是 “如何结合预期移动路径,布置机关与敌人”,演讲中通过具体案例进行了说明。

例如某地形的预期移动路径如蓝色箭头所示(见现场图片),如何通过元素布置提升体验节奏?《宇宙机器人》成品中,团队在台阶中间放置了 “可通过拳击破坏的物体”。矢德先生解释道,这种布置的关键在于 “根据玩家可能的访问角度,确定物体的朝向”—— 同时利用台阶侧面的空间,让玩家在 “拳击破坏物体后,将左摇杆从左拨到右” 的操作更具爽感,最终实现 “比初始预期路径更流畅的节奏”。

另一案例是 “向画面深处延伸的长道路”,团队在道路尽头放置了 “南瓜敌人”:玩家需 “左右迂回移动” 以躲避敌人发射的球状攻击。为引导玩家自然做出 “迂回躲避” 动作,团队在 “预期路径上” 放置了 “树叶堆”,并在 “移动目标点” 放置了 “可拳击破坏的物体”—— 通过视觉引导,让玩家在躲避攻击的同时,自然靠近目标。

要点 11:结合手柄操作布置元素
如前文提到的 “左摇杆从左拨到右” 的操作,“让手柄操作更具节奏感” 的布置方式,也是打造节奏流畅关卡的有效技巧。
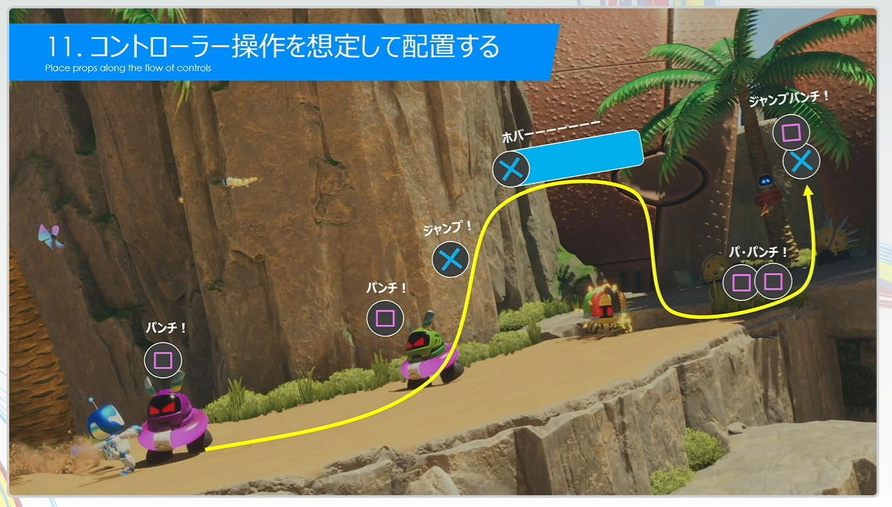
以某关卡为例:画面中放置了 5 个敌人,远处有等待救援的机器人,黄色线条为预期移动路径。团队会调整 “敌人间距”,确保 “手柄操作能形成流畅的节奏(如‘打节拍’一般)”;甚至会精确计算 “后续悬浮、跳跃的时机”,让整个操作流程连贯顺畅。
要点 12:衔接连贯动作
布局篇的第 12 个要点,是 “通过元素布置衔接连贯动作”。矢德先生表示:“玩家掌握某一动作后,若能为其提供‘连续使用该动作的场景’,就能让游玩节奏更流畅。”
同时,团队还会在 “连续使用动作的过程中”,设计 “击败敌人”“爽快移动” 等环节 —— 确保玩家能顺畅推进,这对 “节奏流畅的玩法” 至关重要。
此外,“让玩家处于‘必须连续使用新掌握动作’的紧张场景” 也很有效:这种设计能让玩家 “通过连贯动作顺畅推进”,尤其适合 “需要逃离危险” 或 “类似竞速跑酷” 的场景。

要点 13:重要元素置于中央
布局设计中,“将重要元素置于中央” 是关键原则之一。演讲中展示的案例关卡里,“等待救援的角色” 被放置在 “地形中央”—— 这也是 “游戏目标(救援角色)” 的所在位置。

“置于中央” 的优势在于:能让元素 “看起来更重要”,降低玩家的遗漏概率。即使从关卡上空视角观察,也能看到 “处于困境的角色” 被放置在广阔地形的中央。

在该关卡中,玩家需按下开关为角色浇水;而开关也被放置在 “颜色鲜艳的圆形区域中央”—— 通过 “中央布局”,减少玩家的探索时间,提升游玩节奏。

某地图案例中,团队通过 “左右对称出现花朵”,将 “下一个目的地” 引导至 “花道中央”
另一案例是 “玩家首次遭遇新敌人” 的场景:这类 “重要场景” 中的敌人基本会被置于中央;但也有例外 —— 某类 “会靠近玩家并随时间爆炸” 的敌人,会被设计为 “围绕玩家外侧分布”,最终让 “敌人靠近玩家的状态” 出现在画面中央,兼顾 “敌人特性” 与 “中央布局原则”。

玩家需在敌人爆炸前,通过旋转攻击将其击飞
“将 Boss 置于画面中央” 是常见设计,但演讲中还提到一个特殊案例:某 “需绕圈攻击” 的 Boss,不仅被置于 “画面中央”,还被置于 “地形中央”;更巧妙的是,玩家击败 Boss 后,“关卡终点(最重要的元素)” 会在中央出现 —— 形成 “目标聚焦” 的闭环。

随着战斗阶段推进,Boss 会离开中央,发起更激烈的攻击
要点 14:用装饰填补空白空间
与 “Boss”“重要元素” 不同,“不起眼的普通物体” 的布局也有讲究。以某关卡为例(见现场图片),蓝色线条为预期主路径,沿途分布着 “可选择探索的奖励点”;若玩家决定前往奖励点,黄色线条为预期探索路径。
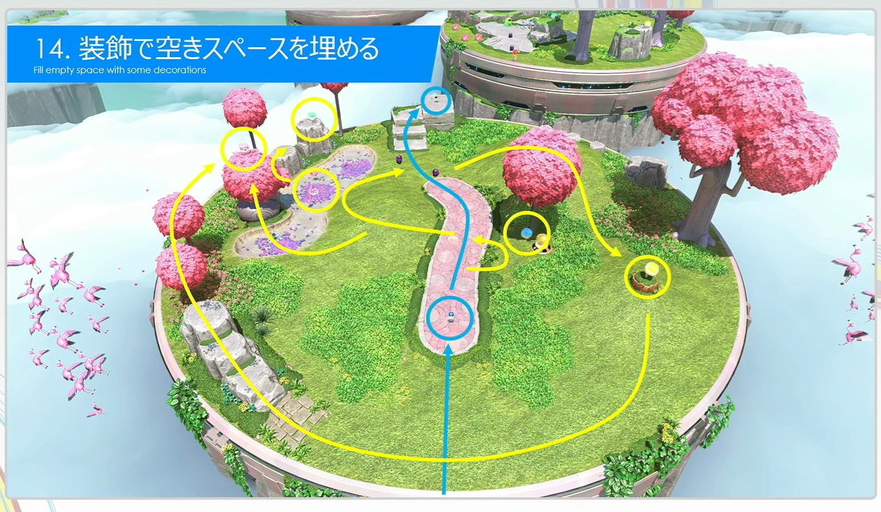
团队认为,“删除预期探索路径外的区域地形” 虽可行,但 “保留地形” 能为玩家提供 “更少压力、更自由的游玩体验”—— 而保留地形的同时,也为 “布置装饰” 创造了机会。
该关卡中,团队在 “需装饰区域” 放置了 “稍高的草”:这些草不会阻碍玩家移动,却能 “柔和地划分不同区域”(矢德先生语);更重要的是,玩家触碰草时,能通过 DualSense 的触觉反馈感受到 “触碰质感” 与 “悦耳音效”,让 “原本空白的空间” 也能传递出 “可交互的趣味”,避免玩家在移动中产生 “单调感”。
此外,装饰还能起到 “引导视线” 的隐性作用。例如在 “主路径旁的空白区域”,团队会放置 “形态统一的低矮植物”,既填补了空间,又不会让玩家误以为这些区域 “藏有秘密或目标”—— 通过 “装饰的密度与类型差异”,间接强化 “主路径与非关键区域” 的区分,减少玩家的无效探索。
要点15. 物理对象需集中摆放
对于构成玩家核心玩法的 “物理对象”,其摆放方式同样暗藏巧思。矢德浩章先生表示,物理对象 “能成为带给玩家乐趣的‘玩具’,因此我们总会寻找机会在关卡中配置它们”;但他同时指出,若像部分设计案例那样将物理对象 “零散地逐处摆放”,会让场景显得杂乱无章,影响玩家的视觉体验与探索焦点。

针对这一问题,团队提出的优化方案是:先确保场景初始状态整洁有序,再将物理对象 “集中放置在同一区域”。至于是否要打乱这些集中摆放的物理对象,完全交由玩家自主决定 —— 矢德先生解释道,这种设计的关键差异在于:“若场景从一开始就杂乱不堪,玩家会产生厌烦情绪;但如果是通过自己的操作让物体散开,反而能从中获得乐趣。”

这种 “集中摆放” 的思路也可融入主路径设计。例如在 “按下开关后关卡会整体倾斜 90 度” 的机关场景中,团队便将物理对象集中摆放,以此作为 “直观展示重力方向变化” 的视觉演出 —— 当关卡倾斜时,集中的物理对象会同步向新的重力方向移动,让玩家清晰感知环境变化。

此外,《宇宙机器人》中还存在这样的设计:集中摆放的树叶类物理对象下方藏有敌人,玩家可通过手柄麦克风输入 “吹气” 动作,吹飞树叶以开阔视野、发现敌人。矢德先生强调:“将物理对象集中摆放,也能有效营造强烈的视觉冲击;反之,若将它们均匀分散在各个角落,会让玩家毫无记忆点,难以留下深刻印象。” 因此,团队在设计中会特意避免后者。
5. 教程与过场动画的常规实现亦以 “易玩性” 为核心 —— 调整篇
要点16. 无需文字说明,让玩家自主领悟
当游戏中出现新能力强化或新机关时,若通过文字说明传递信息,会中断游玩流程、打乱节奏。对此,矢德先生分享了一种 “无需说明即可让玩家领悟” 的有效方法:为玩家设置 “可自主试错的探索区域”。
在该区域之后,团队会设计 “需掌握新元素用法才能推进” 的机关 —— 若玩家已通过试错理解新元素的功能,便可顺利前进;若玩家始终无法领悟,系统会在一定时间后自动播放教程动画,且播放过程中不会暂停游戏,避免进一步打断节奏。值得注意的是,动画触发前的等待时长会根据场景特点精细调整,核心原则是 “尽可能不剥夺玩家‘自主发现玩法’的机会”。

即便在 Boss 战中,也会存在 “需要玩家理解后才能应对” 的机制;但激烈的战斗中,玩家往往无暇观看教程动画。因此,团队采取了一种有效策略:在 Boss 战前设计一个简短的 “准备阶段关卡”,既能调动玩家情绪,又能让玩家在轻松氛围中回忆关键机关与动作的用法。
矢德先生特别强调:“这种设计思路不仅适用于 Boss 战 —— 确保玩家的游玩情绪不被中断,对打造节奏流畅的关卡至关重要。”
要点17. 减少玩家无法操作的 “空窗期”

矢德先生先特别说明:“这一点虽不属于关卡设计范畴,但仍与整体体验相关”—— 他透露,《宇宙机器人》开发团队始终致力于 “减少玩家无法操作的时间”。例如在 Boss 战的阶段切换演出中,玩家仍可保持操作,无需被迫等待演出结束。
团队此举的目的是:“比起通过过场动画展现剧情,更希望让玩家在实际游玩中感受剧情,从而产生‘亲身经历’的沉浸感。” 演讲现场还通过视频展示了另一处优化:加载界面中,玩家可通过手柄陀螺仪进行操作,同时画面会实现流畅过渡,避免加载过程中的操作空白。

要点18. 让玩家能预判 1 秒后的操作
在介绍第 18 个要点时,矢德先生首先指出:“玩家在游玩过程中,会不断在脑中规划‘下一步移动方向’‘该按下哪个按键’等操作。” 基于这一特点,若在玩家规划好操作后,突然在其面前出现敌人,“会迫使玩家调整计划,反而能带来恰到好处的刺激感”。
他进一步解释:玩家从 “调整计划” 到 “执行新操作”,通常需要约 1 秒时间。因此,若提前一点时间让敌人登场,玩家便能在移动过程中同步完成新计划的制定与执行,最终实现节奏流畅的游玩体验。
除敌人登场时机外,关卡推进方向的设计也需注意:当玩家向画面深处推进时,视野开阔、可提前规划的时间充足;但当玩家向画面纵向(上下方向)推进时,易因视野受限导致 “难以预判前方路况”。由于纵向推进时玩家的规划时间会缩短,团队会特别注意 “确保玩家看到平台或机关后,有足够时间判断操作”,例如通过放置金币等元素 “强化路径引导”,帮助玩家快速做出决策,减少犹豫。

要点19. 为推向终点营造情绪高潮
调整篇的最后一个要点聚焦 “终点设计”。矢德先生认为:“关卡结尾给玩家留下的印象至关重要”,并以 “看似是终点,实则仍有后续玩法” 的场景为例进行说明。
这类场景中,背景音乐会突然变得紧张,营造 “心跳加速” 的氛围,同时设置一定挑战;但为避免玩家因失误导致节奏断裂,挑战难度会控制在 “不会过难” 的范围。最终,玩家能在情绪高涨的状态下抵达终点,为整个关卡体验画上圆满句号。

矢德先生还提到,营造终点高潮的简单方法之一,是在终点前设置 Boss 战 —— 但需注意一个关键细节:Boss 战结束后,需确保玩家能 “保持高涨情绪” 直达终点,避免因 Boss 战后的流程拖沓导致情绪冷却。
6. 避免 “隐藏过深无人发现” 或 “空无一物却引人遐想”—— 秘密设计篇
20. 隐藏内容时需搭配提示
演讲伊始,矢德先生抛出了一个小问题:“下图场景中,通往‘隐藏区域’的入口在哪里?”

答案是地形外侧那处 “唯一断开的连续栅栏”。此处 “栅栏缺失” 本身就是一条提示,团队刻意设计了这样的情绪动线:让玩家先产生 “这里好像有什么” 的直觉,进而主动探索,最终发现秘密时收获 “果然藏在这里” 的乐趣。

演讲中还分享了其他 “秘密提示” 的案例。例如在 “按下开关后彩色墨水会流动” 的关卡中,“墨水在空中流动” 这一现象,实则是在暗示 “透明地板” 的存在;而后续关卡中,还加入了 “玩家需自行引导墨水流动,从而找到透明地板位置” 的进阶设计,让玩家在掌握提示逻辑后能举一反三。

另一案例中(见下图),粉色圆圈标注的木桶里藏着等待救援的机器人。除了 “木桶插着剑”“能看到可拉动的绳索” 这些视觉提示外,游戏中还设计了 “从木桶里传出机器人声音” 这一更明显的听觉提示,多维度引导玩家发现秘密。

矢德先生强调:“能否让玩家享受‘发现隐藏内容’的乐趣,与提示的设计质量密切相关。”
要点21. 合理把控发现难度的 “层次感”
在关卡中隐藏玩家想要收集的物品时,核心考量点是 “发现难度的平衡”。
《宇宙机器人》的设计策略是:
- 70% 的隐藏内容 “易于发现”,且其中大部分会搭配 “动作挑战”(如 “需精准跳跃才能获取”),让玩家在轻松找到目标后,还能通过挑战获得额外成就感;
- 约 30% 的隐藏内容难度 “适中”,如前文案例所示,会配备清晰提示,确保玩家通过观察和思考能找到;
- 仅设置少量 “高难度隐藏目标”(Secret Goal),满足核心玩家的深度探索需求。
矢德先生同时提醒:“设计师容易不自觉地‘把内容藏得太深’,导致玩家根本无法发现,因此需要时刻警惕这种倾向。”

此外,《宇宙机器人》还加入了一项贴心功能:玩家重玩已通关关卡时,可 “支付金币获取隐藏内容的位置提示”。但针对高难度隐藏目标,系统仅会标注位置,不会告知 “具体发现方法”—— 既降低了探索门槛,又保留了核心解谜乐趣。矢德先生解释:“设计高难度秘密存在‘玩家无法体验到’的风险,但刻意融入不同难度的秘密,能让探索过程更有层次感,避免单调。”
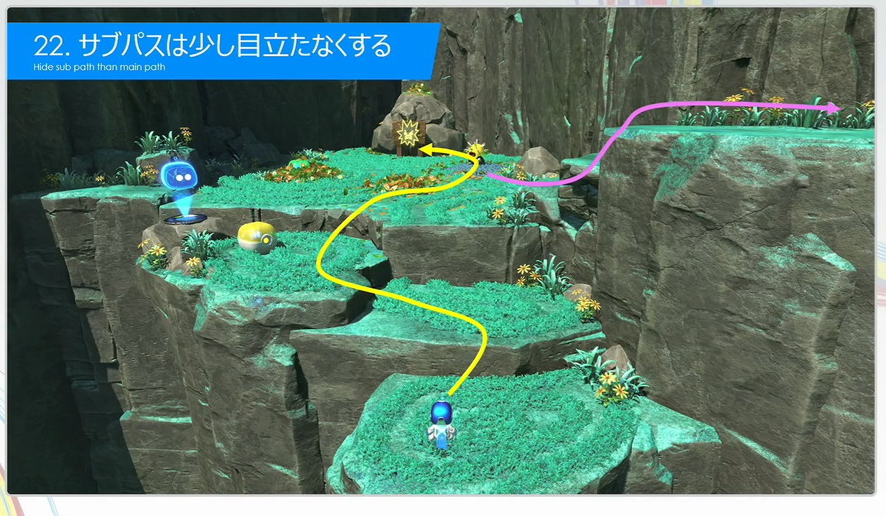
要点22. 让支线路径稍显低调
接下来的要点聚焦 “非主路径的支线路径” 设计。假设有两条路径:一条是通往关卡终点的主路径,另一条是藏有奖励的支线路径。玩家通常会希望 “先去支线拿奖励,再返回主路径推进”,但若无法区分两条路径,会因 “犹豫该走哪条” 拖慢探索节奏。
解决方法是 “通过设计差异,让主路径更显眼,支线路径稍显低调”:
- 例如调整路径宽度 —— 主路径设计得更宽阔,支线路径相对狭窄;
- 或改变路径角度 —— 让主路径保持 “正向延伸”,支线路径以 “略微倾斜” 的角度分支,减少视觉上的存在感。

以某关卡为例(见下图):黄色线条标注为主路径,粉色线条为支线路径。主路径的清晰设计能让玩家 “不犹豫地快速推进”;同时,团队会特意留出 “让玩家在推进前停下观察” 的时间,引导他们发现支线路径,获取奖励后再顺畅回归主路径,形成 “推进 – 探索 – 再推进” 的流畅节奏。
要点23. 让支线路径的 “返程过程” 充满乐趣
“拿到支线奖励,并不意味着支线路径的使命结束。” 矢德先生将支线比作 “郊游”——“从支线返回主路径的这段路,同样是支线体验的一部分”。若玩家拿完奖励后,只能 “沿原路单调返回”,会觉得返程漫长又枯燥。
为此,《宇宙机器人》采取了两种优化方式:
- 设计专属返程路线:为支线路径配套 “与来时不同的返程通道”,例如 “来时需攀爬,返程可乘坐滑索”,让返程过程本身充满新鲜感;
- 返程路线引导视线:调整返程路线的视角设计,让玩家在移动时,“下一个核心目标”(如主路径的机关、新场景入口)自然出现在相机正面,实现 “从支线返程到主路径推进” 的无缝衔接。

例如某支线路径的返程设计:玩家沿专属通道移动时,画面左后方的 “下一个目标点” 会逐渐进入视野中心,无需刻意寻找就能明确接下来的方向。
除专属返程路线外,“通过地形设计简化返程” 也很有效。例如某支线路径需要 “不断向上攀爬,击败顶端敌人获取奖励”,团队便设计了 “从顶端直接跳跃即可落回主路径” 的地形 —— 无需原路返回,既节省时间,又能通过 “跳跃下坠” 带来爽感。
要点24. 在 “玩家觉得能到达” 的地方放置奖励
矢德先生认为:“在玩家产生‘这里好像能过去’‘说不定藏着什么’的探索兴趣的地方,放置奖励作为‘回应’,能有效提升探索动力。” 即使是玩家主动绕路探索的场景,团队也会注重两点:
- 设计 “符合移动逻辑的地形”,确保玩家能 “顺畅到达目标区域”,不会因 “看似能到却无法到达” 产生挫败感;
- 配置 “适配手柄操作的元素”,让探索过程中的移动、跳跃等操作手感连贯。

例如某关卡中,玩家会觉得 “好像能爬到树上”,当他们成功抵达最高处时,会发现大量金币 —— 这种 “直觉与奖励匹配” 的设计,能强化探索的愉悦感。
这种思路甚至适用于 “设计师最初未规划的区域”。例如某 “巨型喷壶藏有奖励” 的机关,开发后期团队发现:若玩家拥有 “空中飞行” 的能力,会觉得 “好像能飞到巨型喷壶的顶部”。针对这种情况,团队提供了三种应对方案:
- 调整设计,让 “玩家觉得无法到达顶部”;
- 将 “喷壶内的原有奖励移至顶部”;
- 在顶部新增 “小型奖励”。

最终,团队选择 “保留‘看似能到达’的视觉效果(因能激发探索欲),同时在顶部新增小型奖励”—— 既满足了玩家的直觉期待,又不会因奖励调整影响原有设计平衡。
值得一提的是,《宇宙机器人》中最初以 “金币” 作为主要小型奖励,但开发后期团队意识到:“玩家深入探索后若只获得金币,可能会觉得‘不够有价值’”。因此,他们新增了一种机关:“在深度探索的奖励点,若能精准时机击打箱子,会获得更多金币”—— 奖励本质仍是金币,但通过 “操作互动” 让玩家获得 “玩得开心” 的额外满足感,变相提升了奖励的体验价值。
7. 为实现 “自动适配易玩性” 的巧思 —— 相机视角篇
要点25. 无需手动调整视角,也能轻松游玩
从这里开始,话题转向游戏内相机视角设计。在《宇宙机器人》中,相机视角调整功能分配在右摇杆上 —— 这意味着玩家手动调整视角时,无法同时操作右摇杆旁的 “跳跃”“拳击” 等按键,容易中断游玩节奏。

针对这一问题,“让相机随玩家移动方向缓慢旋转、自动转向” 是常规解决方案。而《宇宙机器人》进一步优化了这一逻辑:例如 “将地形向左延伸”,引导玩家向左移动,相机便会随之自动转向左侧,无需玩家手动操作。
矢德先生透露:“开发阶段,我们会‘不手动调整相机’进行测试,一边确认‘相机是否能自然捕捉到该展示的内容’,一边优化地形设计。” 确保玩家在不操作相机的情况下,也能清晰看到关键信息(如路径、机关、敌人)。
要点26. 按场景需求,设置 “适配体验的专属相机”
开发团队会根据不同场景的体验需求,定制专属相机参数。例如某关卡中:
- 当玩家需要 “跳跃越过有孔洞的区域” 时,相机会调整为 “从上向下俯瞰” 的角度,让玩家清晰判断 “与孔洞的距离”,避免掉落;
- 跳跃过后,相机会自动降低角度,变为 “平视视角”,方便玩家观察前方即将触发的事件(如敌人出现、机关启动)。

另一 “关卡整体倾斜 90 度” 的趣味场景中,相机被设置为 “保持朝向墙壁的角度,玩家可横向移动”—— 通过 “相机固定、玩家移动” 的方式,避免因相机频繁调整导致的视角混乱,提升操作直观性。
还有一个典型案例:游戏中存在 “长按方块键抓住敌人尾巴摆动,松开按键即可将其扔出” 的猪形敌人。由于玩家摆动敌人时需 “长按方块键”,无法同时操作相机,因此团队设计了 “相机自动转向‘扔出敌人后可破坏的目标’” 的逻辑 —— 确保玩家无需调整视角,就能精准将敌人扔向目标。

要点27. 缩短相机与玩家角色的距离
相机与玩家角色的距离同样是关键设计点。拉远相机虽能让玩家看清周围环境,但存在两大问题:
- 会让 “玩家与角色的情感连接变弱”,难以产生 “代入感” 和 “兴奋感”;
- 会降低移动时的 “速度感”,让动作体验显得拖沓。
因此,《宇宙机器人》的相机距离设计遵循 “优先保证易玩性” 的原则,同时尽可能 “让相机贴近角色”—— 在 “能看清关键信息” 和 “强化代入感、速度感” 之间找到平衡,让玩家既能顺畅操作,又能深度沉浸在角色的动作体验中。

8. 以 “团队成员能乐在其中” 为首要目标 —— 设计思路篇
要点28. 重质轻量,优先保证体验质量
最后一个模块是矢德先生所说 “融入了自身反思” 的 “设计思路篇”。
他分享了本次开发最大的感悟:“当开发过程中感到不安或缺乏自信时,很容易陷入‘过度追求数量’的误区。” 以《宇宙机器人》的洞窟关卡为例,最终成品仅包含 2 个层级,但实际上直到开发后期,团队都在推进 3 个层级的制作,最终图片所示的层级因体验优化需求被删减。
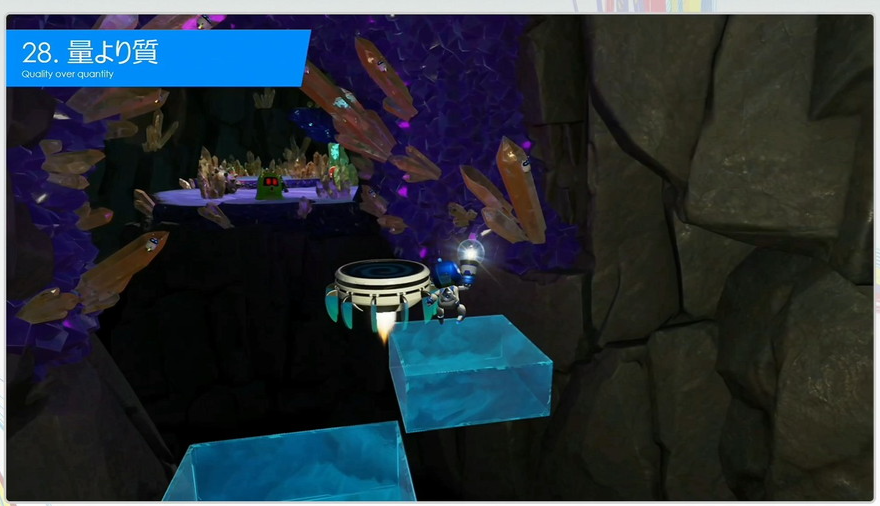
被删减的关卡层级,当时已完成大量制作工作
矢德先生也提及了 “过度追求数量” 的弊端:“数量越多,需要修改的内容就越多,美术团队、音效团队需要构思和制作的素材也会随之增加,最终可能导致所有环节的负担都加重。” 他在复盘时表示,即便内容数量较少,只要质量过硬,玩家依然会感到满足;因此,即便开发中产生不安,也不应通过 “堆数量” 缓解,而应聚焦 “提质量”。
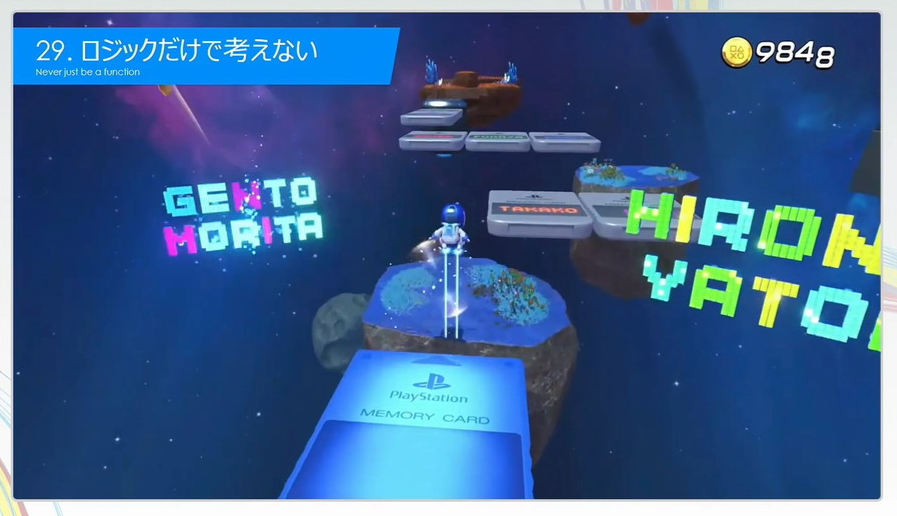
要点29. 不局限于逻辑,更要兼顾情感共鸣
第 29 个要点聚焦 “不仅凭逻辑做设计”。矢德先生认为:“仅为满足‘必要功能’而做的设计,无法触动玩家的内心。” 他透露,团队在开发中始终提醒自己:“设计不仅要‘合理’,更要‘有趣’。”

例如设计隐藏区域时,团队的目标不仅是 “让玩家获得‘找到隐藏内容’的奖励”,更希望 “‘发现隐藏区域的过程’本身能成为玩家记忆深刻的快乐瞬间”—— 比如通过 “听觉 + 视觉双重提示” 引导玩家探索,让发现的过程充满惊喜感,而非单纯的 “完成收集任务”。
再如游戏结尾的制作人员表(Credit):从功能上看,只要显示工作人员姓名和版权信息,就已满足 “必要要件”;但团队考虑到 “玩家可能会想跳过冗长的列表”,特意在制作人员表中加入了 “可互动游玩元素”(如让玩家在观看列表时仍能操控角色做出简单动作、触发趣味反馈),力求让玩家 “全程保持愉悦的心情”,直至游戏结束。
要点30. 反复迭代,不断优化设计
第 30 个要点,也是最后一个核心思路,是 “反复重做、持续优化”。
在 Team ASOBI,团队以 “两周” 为一个开发周期,进行任务规划与成果评审。每个游戏设计师需在两周内,将一个关卡打磨到 “无需额外说明,玩家就能直接享受游玩乐趣” 的状态。周期结束时,全体团队成员会集中到办公室,开展 “关卡互评”—— 流程中还包含 “随机挑选团队成员进行测试游玩” 的环节。无论是对关卡设计细节了如指掌的开发成员,还是不熟悉设计背景的测试者,都能在游玩中发现 “亮点” 与 “问题”,提供多元反馈。

矢德先生提到:“作为游戏设计师,我们在最初两周的关卡设计中,首要目标是‘让团队成员玩得开心’。” 这是他们开发时始终坚守的原则。
互评环节的最后,团队会要求每位成员针对被评审的关卡,各提出 “一个优点” 和 “一个可优化点”,确保反馈具体且有建设性。
他举例说明迭代过程:某款 “在黑暗中依靠灯泡机关照明前进” 的 “方块挑战” 关卡,测试时广受好评;但另一款名为 “派对乐园” 的隐藏关卡,却收到大量 “缺乏派对氛围”“没有特别感” 的反馈。团队基于这些意见展开讨论,最终通过 “调亮场景光线”“增加彩色装饰道具” 等调整,大幅提升了关卡的体验感。
至此,关于《宇宙机器人》关卡设计中所蕴含的理念与技巧的 30 个要点介绍全部结束。矢德先生最后表示:“本次演讲聚焦于关卡设计,但实际上团队的所有工作,都是通过成员间的反馈不断相互改进的成果。” 言语间满是对团队成员的感谢。
原文:『アストロボット』のレベルデザイン「30の秘訣」!テンポのいいサブパス探索設計から丁度いい秘密の隠し方まで【CEDEC2025】|ゲームメーカーズ